Detecting Contact
Jump to navigation
Jump to search
Implementation of contact needs decide is the two surface are in contact or separated. The pages describes the available contact detection methods.
Basic Contact Detection

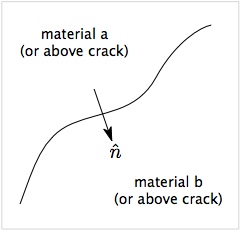
The figure shows a surface between two materials (a and b) or between two sides of a crack (above and below). The arrow shows a vector normal to the surface oriented from side a to side b. For both multimaterial contact and crack contact, the first step is to decide if the two velocity fields at the node are actually in contact. NairnMPM uses two (or more) criteria to detect contact.
- Approach velocity
- The first step is to decide the two surface are approaching each other in the normal direction. This criterion reduces to [math]\displaystyle{ \Delta\vec v \cdot \hat n \lt 0 \qquad {\rm where} \qquad \Delta\vec v = \vec v_a - \vec v_b }[/math] When this criterion is not satisfied, the surfaces are separating and assumed to not be in contact. In early multimaterial MPM, when this criterion is satisfied, the surfaces were assume to be in contact. It is easy to visualize, however, that this approach detects contact when surfaces are just are approaching each other but still separated. For improved contact, a second criterion based on displacements is added.
- Displacement check
- If the approach velocity criterion is satisfied, NairnMPM next looks at displacements or positions of the two velocity fields. Basically, this criterion calculates the location of the two surfaces. If the overlap in the normal direction the surfaces are in contact. If they are separated, the surfaces are not in contact. There are two ways to find crack surfaces from displacements or positiong in velocity fields; these methods are described in the section on the #ContactPosition Command.
Notes
- Since the displacement check seems to track contact best, why not skip the approach velocity criterion? The answer is that the algorithms used to adjust nodal momementum for some contact physics (e.g., friction) do not make physical sense unless that criterion is satisfied.
- The displacement check is option in multimaterial mode but is always done for crack contact.
- Multimaterial mode has an optional screening criterion based on nodal volume that can help screen out nodes that are likely to cause numerical inaccuracies.
Multimaterial Mode Contact Detection
The first step is to decide if the materials at the node are actually in contact. NairnMPM allows a simulation to use various combinations of the following three contact detection criteria:
- If the total volume at the node is less than some fraction of the total volume expected for an internal node (a parameter Vmin), the materials at that node are assumed to not be in contact. If the volume is greater than Vmin, the contact detection continues. This check can be skipped by setting Vmin = 0 (because all nodes with materials will have volume greater than zero).
- Next, the normal to the material contact surface is calculated and it is used to determine the velocity of approach for the two material surfaces. If the surfaces are moving apart, the node is assumed to not be in contact. If they are moving toward each other, the contact detection continues.
- Finally, if enabled, the displacements for each material at the node are calculated. If the two materials overlap, the node is in contact. If not, the node is assumed to not be in contact. There are two ways to find displacements. The method is selected with the ContactPosition command (where details on the methods are given).